[VIP第1年] 指数:3
[VIP第1年] 指数:3
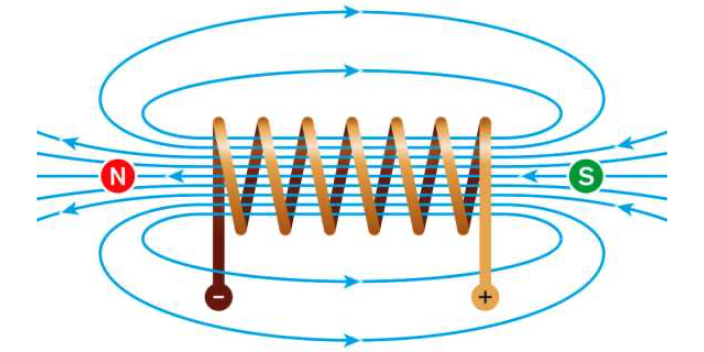
磁体自身电阻较小,加在磁体两端的高电压在磁体中产生大电流,产生强磁场。但由于磁体电阻不可能为零,在通过瞬间的大电流时,磁体本身会瞬间发热产生高温,其自身的电阻也会随着温度的升高进一步增大,增大的电阻在大电流通过时更进一步发热。如此,为了真正让磁体通过脉冲式高稳定度大电流,并不能简单给磁体配置一个脉冲式高稳定度的电压源,而是需要一个脉冲式、纹波小、可控、快速反应的电源。强磁场磁体的电源不用于其它装置的供电电源,在需要产生磁场的时候,电能以很快的速度释放至磁体产生强磁场。由于瞬时功率很大,若从电网中取电必然会对电网造成冲击。故而需要电源系统在较长时间内储存大量的能量,然后以此储能电源系统作为缓冲来为实验提供大功率的瞬时电能。电压传感器的输入是电压本身,输出可以是模拟电压信号、开关、可听信号、模拟电流电平。上海霍尔电压传感器供应商

削去原有电源系统纹波的补偿方案有三种:注入、吸收、少则注入多则吸收。是单方向的向磁体注入电流,填补纹波,将整体的电流修正到纹波很低的水平。从磁体中吸收电流,是削波的方式将纹波中和得到纹波更小的电流。前两种方案的综合,将高于设定值得电流吸收、低于设定值的电流则进行补偿,电流的供应室双向的,即积存在注入也存在吸收。由于磁体电源系统中三套电源是各自**向磁体供电的,所以补偿电源系统的设计业可以**进行。由上述补偿方案可见,补偿电源只需要补偿原供电系统中纹波部分,所以补偿电源容量较小,可以直接从电网中取电进行AC/DC变换。补偿电路原理图如图2-3所示B1为三相工频整流桥,C0为储能电容器,B2为IGBT逆变桥,TM为高频变压器,B3为高频整流桥。Lf和Cf构成输出滤波器,Cp为补偿电容,Lp为滤波电感,DCCT为高精度零磁通电流传感器。常州电压传感器目前的滤波装置级数低,滤波效果较差,输出端 可以采用LCCL三阶滤波器。

在产生移相脉波时,计时器的计时都有一个固定的时基,计时器以时基为参考点开始计数,当比较寄存器中的值和设定值相等就会产生一个比较中断。由此机理,移相角的改变有两种方法:1)不断改变时基;2)不断更新比较值。DSP比较寄存器处于增减计数模式,一般时基是固定的。由于增减计数模式中每一个周期都会产生一个周期中断和下溢中断,于是我们可以利用这两个中断将设定值重置来实现另外一对PWM波的移相。超前桥臂上一对互补PWM波由比较单元1产生,对应的比较寄存器为T1CMPR,即为比较寄存器1的设定值,计数寄存器为T1CNT。滞后桥臂上一对互补的PWM波由比较单元2产生,对应的比较寄存器为T2CMPR,即为比较寄存器2的设定值,为了保证参考坐标的一致性,比较单元2和比较单元1共用同一个计数寄存器。
数字控制电路的软件主要包括主程序、各个模块初始化程序、周期中断服务子程序、下溢中断服务子程序、AD中断服务子程序、PID调节子程序等几大部分组成。主程序的主要任务是系统自检,系统初始化,然后循环执行主程序等待中断。初始化是对程序中用到的常量、变量进行有意义的赋值,以及对PWM输出口和DSP数字I/O口设置,中断寄存器的赋值、定时器的赋值、事件管理器中相关寄存器的赋值以及A/D模块中寄存器的赋值也是初始化程序需要完成的任务。为了保证主电路的安全,在初始化完成前,所有的定时器都被禁止,PWM输出比较器也未被使能,PWM对应的输出为高阻态。ADC模块初始化是对A/D采样的模式,采样的通道、转换的方式等进行设置。ADC模块的启动由周期中断完成,采样完成后A/D等待中断响应,采样值倍读取后进行PID计算,计算结果即为下一周期输出PWM的移相角度。整个程序主要任务是时刻监测电路重要信号,保证电路安全工作的前提下,利用DSP内部各个模块实现采集输出端电压电流信号,通过PID子程序处理后得到具有死区时间和相位差的四路PWM波。板之间的磁场将创建一个完整的交流电路没有任何硬件连接。
程序首先对系统初始化,内部定时器开始计数,计数到产生定时器中断,主程序进入AD中断子程序。AD片选信号置低,子程序实现对AD的初始化,初始化的主要任务是控制AD的输入通道。AD的转换开始信号由DSP的计时器控制,DSP循环计数,当计数器计数到设定值则进入计时中断,中断子程序中给AD一个低电平脉冲信号,AD开始转换,转换完成后AD本身产生一个低电平信号告知DSP转换完成,DSP接收到低电平信号开始读取数据,读取完设定的采样个数后打开DSP总中断发送数据至内部处理器计算处理。如此循环往复,实现了对输入电压电流信号的实时采集。这就是电容器的工作原理。上海霍尔电压传感器供应商
有两种方法可以将敏感元件的电阻转换为电压。上海霍尔电压传感器供应商
整个电路的控制**终都归结于对PWM波的控制,对于移相全桥电路来说,**根本的问题也归结于如何产生可以自由控制相位差的PWM脉冲。DSP产生脉冲一般是由事件管理器的PWM口和DSP模块中的数字I/O口实现。由于在移相控制中,四路PWM波要么互补要么有对应一定角度的相位差关系,其中PWM波互补的问题很好解决,但为了方便的控制移相角的大小,须得选用四路有耦合关系的PWM输出口,以减小程序编写的复杂性和避免搭建复杂的外围电路。根据移相全桥的控制策略,四路PWM波须得满足:1)同一桥臂上两波形形成带有死区时间的互补;2)对角桥臂上的驱动波有一个可调的移相角度,移相角的大小与一个固定的参数直接相关以便于实现动态的控制。上海霍尔电压传感器供应商
文章来源地址: http://dzyqj.cmgdjgsb.chanpin818.com/chuanganqisr/hecgq/deta_27848030.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。